
服务热线:
400-6510265

- 首页
- 产品展示
>激光雷达
>光通讯器
>机器视觉
>智能传感器
>光电仪器
>机器人相关
>二维激光雷达
>IO型光通讯器 >面阵工业相机
>光电传感器
>激光器
>编码器
>三维激光雷达
>串口型光通讯器 >线阵工业相机
>超声波传感器
>光功率计
>惯性传感器
>区域防护激光雷达
>以太网型光通讯器
>智能相机
>振动传感器
>光束质量分析仪
>舵机
>安全激光雷达
>并行传输型光通讯器
>3D 深度相机
>颜色传感器
>波前传感器
>机械臂
>固态激光雷达
>长距离型光通讯器
>镜头配件
>位移传感器
>阻抗分析仪
>机器人平台
>激光测距传感器
>科研相机
>热金属传感器
>任意波发生器
>工业网关
>安全传感器
>锁相放大器
>毫米波雷达
>检测/测量设备
>拉曼光谱仪
>超声波仪器
>光催化仪器
>恒温制冷设备
>冷冻干燥仪器
>立式超低温冰箱
>培养箱设备
>生命科学仪器
>微生物检测设备
>样品处理设备
- 解决方案
- 资料下载
- 行业资讯
- 关于我们







我们先看下结论:
1. 垂直FoV不满足90°,客户安装补盲激光雷达将因为感知范围不足陷入两难境地——要么保证地面盲区无法有效覆盖上方视场,要么覆盖上方视场无法有效保证地面盲区;
2.E1的90°垂直FoV,可以更好地兼顾车身贴近地面的盲区和朝上的视场角,在避免车轮与车身附近的障碍物磕碰的同时,也能在更近的距离探测到物体全貌,对近距离目标的类型、朝向感知能力更强。
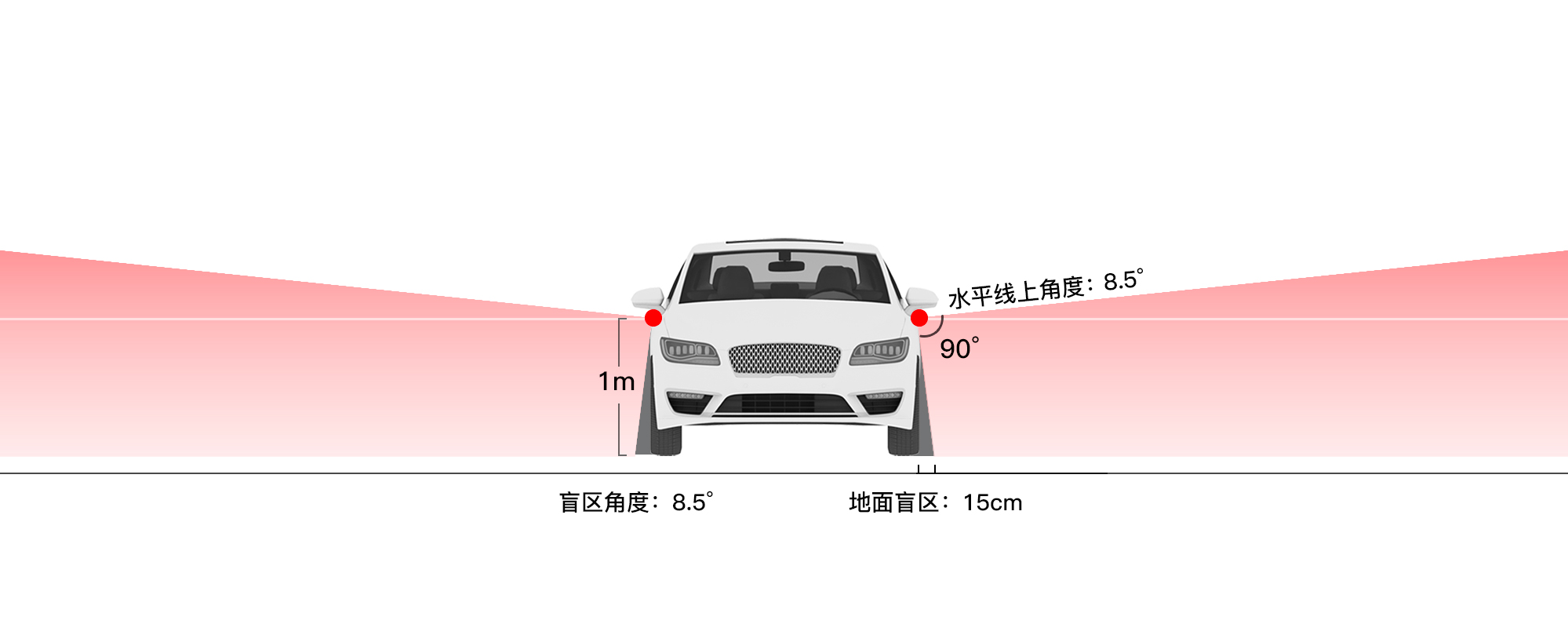
在城区、高速道路等更趋复杂的驾驶场景下,解决了水平面的360°环视感知盲区的问题,要想进一步扫除车身附近的视场盲区,并朝上看到尽量大的视野,垂直面的视场角必须做到足够大,才能实现真正意义上的感知「零盲区」。这是E1将垂直FoV定义为90°的原因。
E1的90°垂直FoV,可以使得部署方案垂直视场下沿尽可能地贴近车身,覆盖地面盲区区域。在帮助地面盲区压缩到20厘米以内的同时,垂直方向视场角保留8°左右的上扬,从而可以完整检出两边车辆全貌,保证感知算法有效检出。
如果补盲激光雷达的垂直FoV达不到90°,部署方案会存在怎样的隐患呢?
答案是会漏检,从而增大了道路安全事故发生的概率。
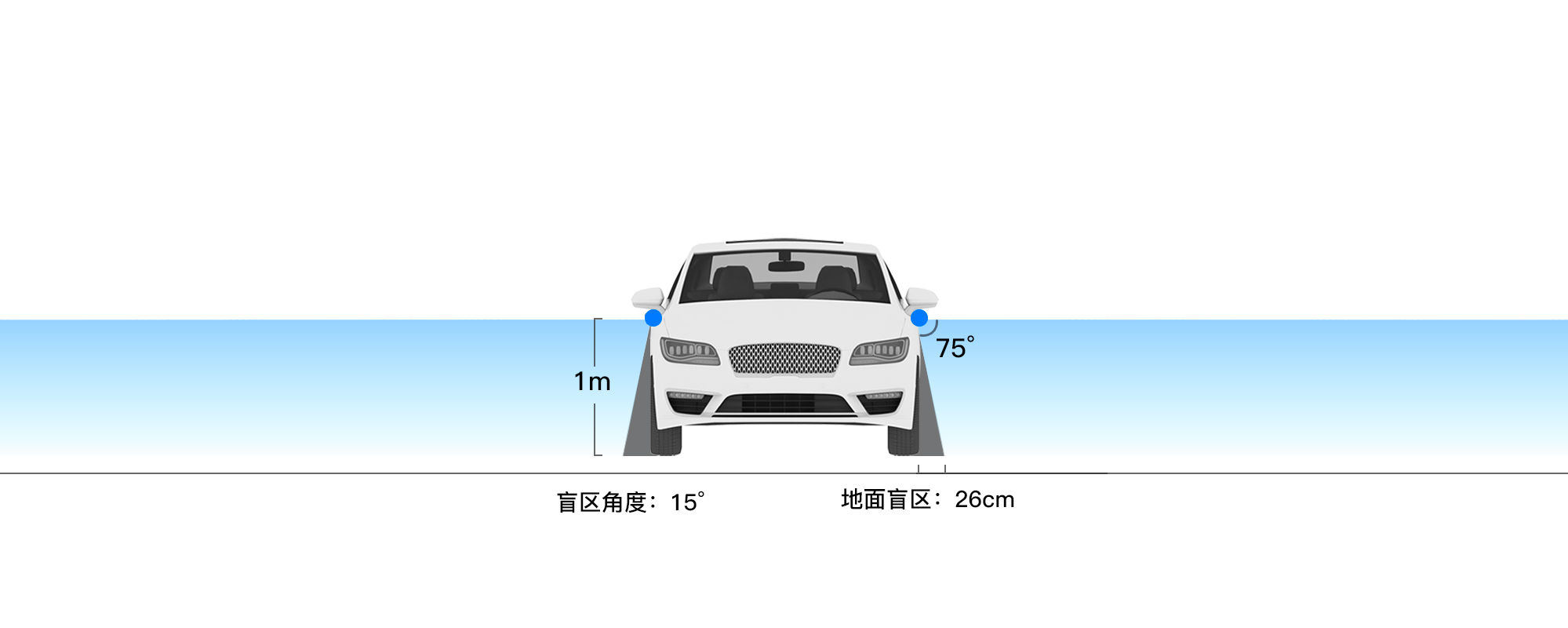
我们以垂直FoV为75°的补盲激光雷达为例。为了适应泊车路沿感知、转弯路沿感知等地面盲区强需求场景,就要将地面盲区距离压缩到20cm*以内,甚至依照更高的要求要达到15cm。
*参考深圳泊车位设计标准,车位宽度最小2m,泊车标线与路边立缘石最小距离15cm,大型SUV宽1.9m,可推算出车辆与路边立缘石最小距离约为20cm。
如果按照垂直FoV下方贴近车身的方式部署,那么其整个视场角将指向地面,而失去水平方向的探测能力。
这不但使得最远感知距离截止到很近的距离以内,而且只能看到周围车辆的下半部分车体,进而导致感知算法无法识别,从而造成漏检。
如果将其垂直视场角往上转动,则其补盲效果就会大打折扣,无法适应泊车路沿感知、转弯路沿感知等地面盲区强需求场景。
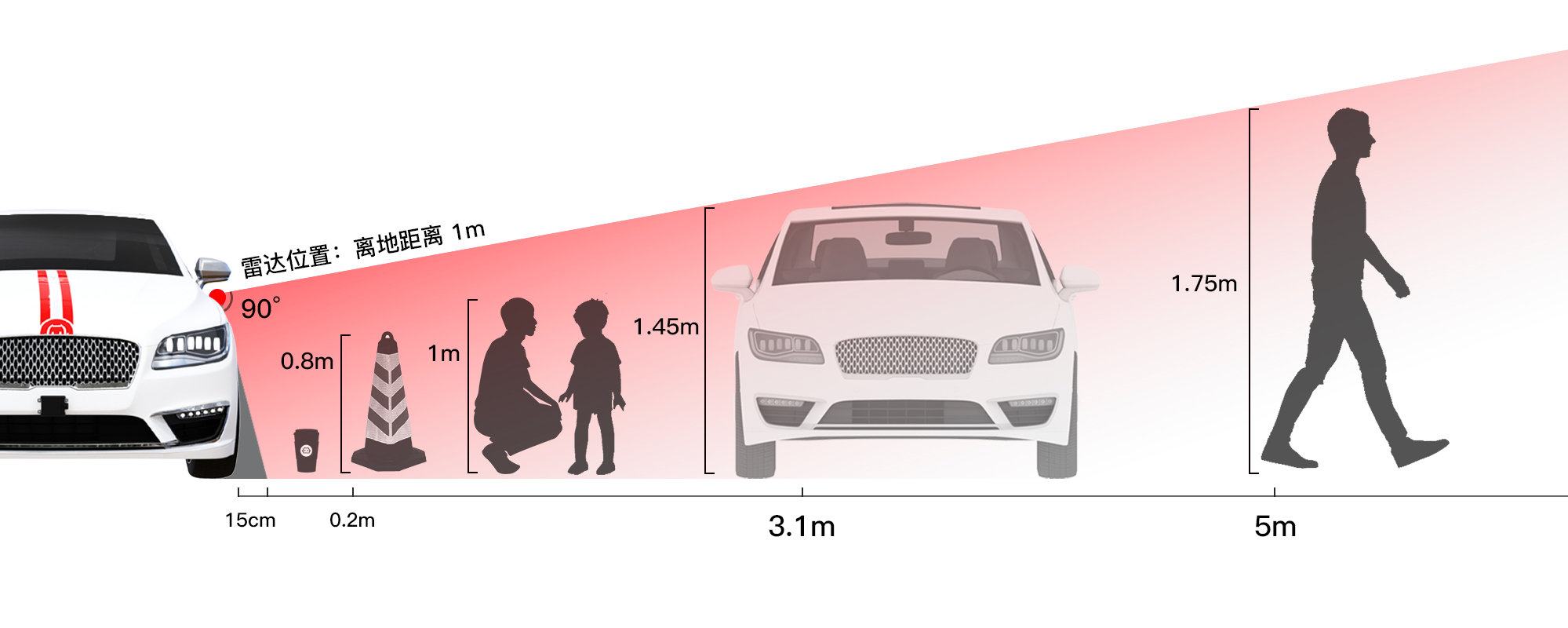
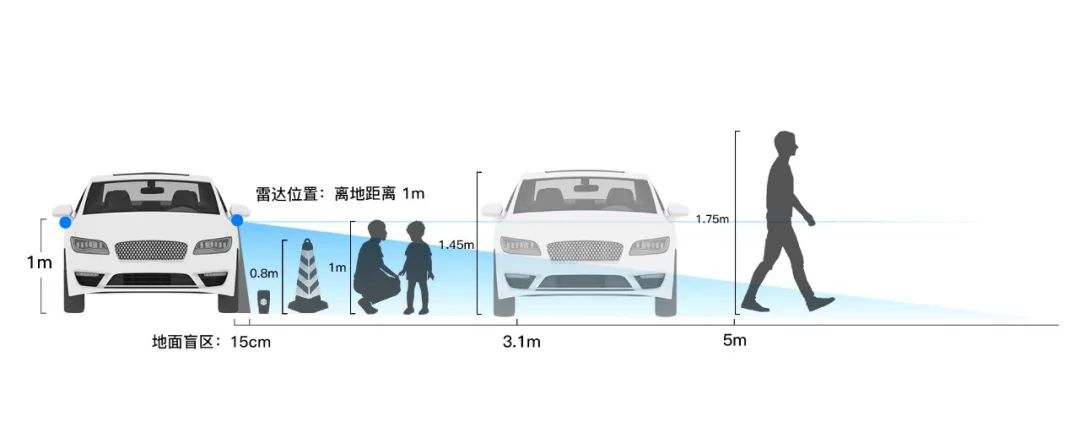
E1在同样的安装方式下,垂直FoV 90°做到了业内最大,不仅把地面盲区压缩了近一半到15cm,同时还保有8.5°朝上的视野,可以在更近的距离看到3m外轿车和5m外成年人的全貌,从而完整检出两边车辆全貌,保证感知算法有效检出。
搭配120°的水平FoV,E1是目前市面上拥有最大视场的全固态补盲激光雷达,可以更好地实现感知零盲区、目标不漏检、检出更全面,为行驶策略提供更可靠的信息,有效提升智能驾驶的安全体验。
